�Ї����w�W(w��ng)Ӎ �����ΙC���˼��g(sh��)�w�ٰl(f��)չ�Į�(d��ng)�£��沿��б��_�ѳɞ�����佻�������ĺ���ָ��(bi��o)���@һ���g(sh��)�wϵ���@�Cе�Y(ji��)��(g��u)�O(sh��)Ӌ������Ƥ�w�аl(f��)����ģ�B(t��i)����ϵ�y(t��ng)��(g��u)��չ�_��ּ���C����ͻ�ơ��C���С����ޣ����F(xi��n)����Ȼ����Ђ��f��
�����Cе�Y(ji��)��(g��u)�ǙC�����沿������������A(ch��)�����O(sh��)Ӌ���沿�������aϵ�y(t��ng)��FACS������Փ���ģ�����(f��)�s�����D(zhu��n)����������Ą�����Ԫ��AU�����Ɔ��}���@�N�D(zhu��n)�����H�Cе�O(sh��)Ӌ���ߘ�(bi��o)��(zh��n)����߀�ܿ���AU����ȣ����F(xi��n)�����_���䏈����ļ�ā�^�ɡ�Ŀǰ�������Cе�Y(ji��)��(g��u)�O(sh��)Ӌ�֞����Cеʽ�c����ʽ��
�Cеʽ�O(sh��)Ӌ��ه���y(t��ng)�Cе���ӣ�ͨ�^�B�U���X݆����C�Ȳ����(q��)���沿�\�ӣ����ʹ�����絾���W(xu��)��KOBIAN�C���ˡ�ԓ�C���˲���ģ�K���O(sh��)Ӌ�����沿���֞�üë���۲����첿�C��(g��u)����ģ�K���������Ɔ�Ԫ���߂�ɱ��͡��S�o�ă�(y��u)�ݣ��������ڄ��Ԃ��ӣ����鼚ā���y��ͻ�ơ�
KOBIAN�C���� ��Դ���絾���W(xu��)
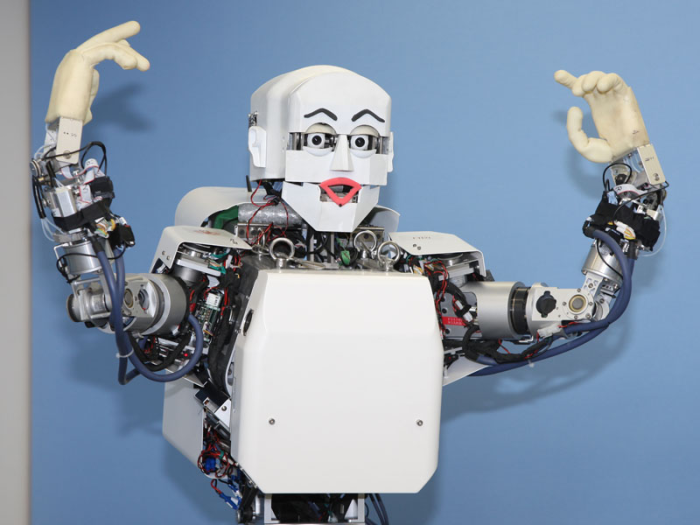
�c֮����������ʽ�O(sh��)Ӌ��ע��ģ�M����沿�����\��߉������ܛ�����c�����(q��)�������g(sh��)��Hanson Robotics ��Sophia�C���������е䷶���䡰�����(q��)�ӡ�����ģ�M���Y(ji��)��(g��u)ͨ�^����˹����⡢�Π�ӛ���Ͻ��Ԫ������(f��)���������տs�c�揈���������Ȼ���棬���^�߶ȷ�������^Ҳʹ�����R���ֲ���Ч��(y��ng)���L(f��ng)�U������(d��ng)�o�B(t��i)������_���R���c����������^�c�ӑB(t��i)�ļ�ʧ��a(ch��n)�����m�С�

Sophia���ΙC���� ��Դ��Hanson Robotics
��(d��ng)ǰ����ģ�B(t��i)����(q��)��ϵ�y(t��ng)�ɞ�ƽ�������cЧ���ă�(y��u)�x������ԓϵ�y(t��ng)ͨ�^�C�-��Ӆf(xi��)ͬ���ƣ������c�����(q��)�Ӹ�˾�����Ͷ�C��нM�ɵĄ����(q��)��ؓ؟(z��)ü�����E���ȴ�λ�ƅ^(q��)���\�ӣ�����˹����⣨PAM��������ģ�K�t���ƴ������۲��Ⱦ��������Ԫ���γɄ�?c��)���ϵķ����?q��)�Ӽܘ�(g��u)���ڱ�������ϣ�ϵ�y(t��ng)���á����Ӌ��-�\�ӌW(xu��)ӳ��-��λ��Ͽ��ơ������wϵ����ͨ�^�����(j��ng)�W(w��ng)�j(lu��)��DNN����������Z�x���ٻ���FACS�������酢��(sh��)��ģ�ͣ���Kͨ�^�迹�����㷨�f(xi��)�{(di��o)���(q��)�ӆ�Ԫ�����F(xi��n)���뼉�ӑB(t��i)�������ɡ�
����Ƥ�w������б��_����K�d�w�����������ֱ�ӛQ�������挍���c������ȡ�Ŀǰ���������ЃɷN�����z�c��Frubber�������z��ӹ����ܺá��׳����Ҽ��݂��������ɞ���A(ch��)�x���ܝM��C�����沿�������^��������^�����ϣ���Cе�����c�挍Ƥ�w����^���y����Ȼ�γɏ�(f��)�s�ް��c���顣��Frubber���ϣ��{��Խ������Cе�����Ó�f�����������|(zh��)��ď����|(zh��)�ؿɾ���(zh��n)ģ�������M����Ƥ�w�ް�����Ȼ����������������ȡ�

���z��Frubber�����ƳɵęC���� ��Դ�������ΙC�����沿��б��_���g(sh��)�о��C���������@�ŵȣ�
���^��Ƥ�w���g(sh��)�l(f��)չҲ���R��������(zh��n)�������nj�(d��o)����c�Cе���ܵę�(qu��n)�⣺�錍�F(xi��n)�|�X��֪�����ڹ��z���w������̼�{����ʯīϩ�Ȍ�(d��o)����ϣ����������ӕ���(d��o)�²���׃��׃Ӳ��ƫ�x�������ԣ��������̖��?d��ng)_���}����ģ�B(t��i)���Ƥ�w�в�ͬ�����������̖����ɔ_��Ӱ푸�֪�ɿ��ԣ���������c��ܛƤ�w���ė���ģ��������l(f��)���摪(y��ng)�����У�����ܛ�w���ϵ�ĥ�p�c��׃������Ƥ�w�L�������ԡ�
���w���������ΙC�����沿��б��_���g(sh��)���ڙCе�Y(ji��)��(g��u)������Ƥ�w�c��ģ�B(t��i)������ȡ���A����ͻ�ƣ��Ę�(bi��o)��(zh��n)���ęCе���ӵ���������ģ�M���ٵ���?c��)���ϵĻ���?q��)�ӣ��sС���c��Ę����IJ�࣬�������R���ֲ���Ч��(y��ng)����Ƥ�w��������ì�ܵȺ�������(zh��n)��
δ�������g(sh��)�l(f��)չ���۽��ɴ���һ��ͻ�Ʋ����c����ƿ�i���аl(f��)��߸ߌ�(d��o)��ԡ����g���c�����Ե����ͷ���Ƥ�w��ͬ�r��(y��u)�����Ӌ��ģ�ͣ�����ӑB(t��i)�c�����������(y��ng)���N�ϣ����Ǽ��و�����أ������t(y��)�����o��ͨ�^��ā������f�P(gu��n)�ѣ��ڽ��������������ӽ��������̌W(xu��)Ч������K���F(xi��n)�ġ����ơ��������ơ��Ŀ�Խ���Ƅ��˙C��н����M�����Ȼ�����ߜضȵ����A�Ρ�
������Դ:
���@��.���ΙC�����沿��б��_���g(sh��)�о��C��
KIMIZUKA. Haptic in-sensor computing device made of carbon nanotube-polydimethylsiloxane nanocomposites
(�Ї����w�W(w��ng)������/����)
ע:�DƬ���̘I(y��)��;�������֙�(qu��n)��֪�h��!